第2章整车控制系统常见故障的诊断与检测
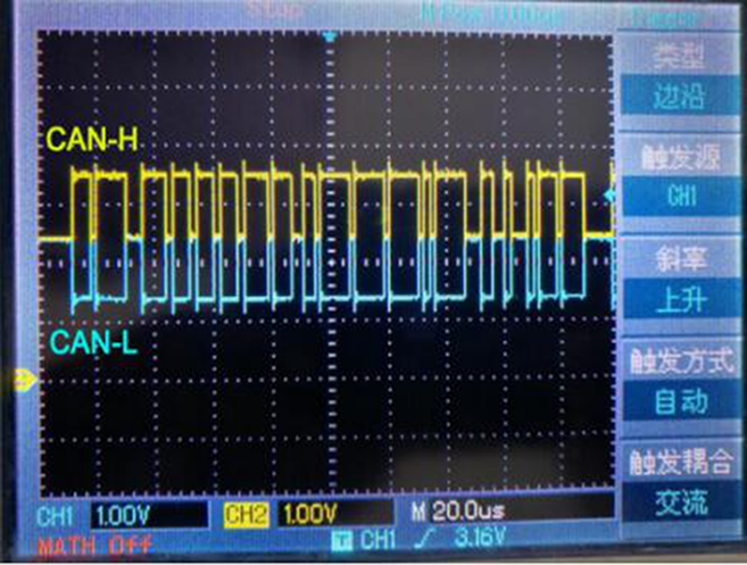
在两个线路总线处于静止时,CAN-H和CAN-L信号电路未被驱动,这代表逻辑“0”。在此状态下,两个信号电路电压均为2.5V,电压差约为0V。当传输逻辑“1”时,CAN-H信号电路被拉高至大约3.5V,且CAN-L电路被拉低至约1.5V,电压差约为2.0(+/-0.5)V。图示为CAN-H和CAN-L运行正常时测试的波形,如果测试波形、电压和以上电压及图示波形不符,则可能存在以下几种情况:
(1)CAN-H故障 1)CAN-H开路;2)CAN-H对地短路;3)CAN-H对电源短路;
(2)CAN-L故障 1)CAN-L开路;2)CAN-L对地短路;3)CAN-L对电源短路;
(3)CAN-H和CAN-L相互短路
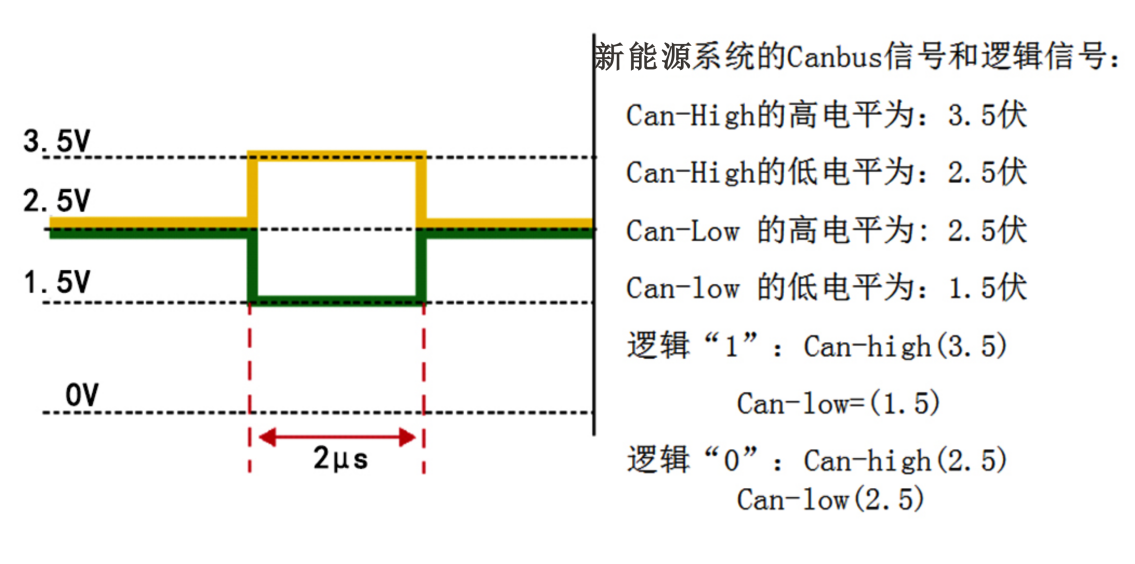
新能源CAN总线用于高速数据交换的地方,以使传感器的值和执行器的值的变化情况和通过信息调节新能源车辆控制装置之间的信息接收状况延迟至最小化。新能源CAN数据网由双绞线组成。一个信号电路被识别为新能源CAN-高速,另一个信号电路被识别为新能源CAN-低速。在数据总线的末端,CAN-高速和CAN-低速电路之间有一个120Ω的终端电阻。数据符号(1和0)以500千比特/秒的速率按顺序传输。通过总线传输的数据通过CAN-高速信号电压和CAN-低速信号电压之间的电压差来表示。在两个线路总线处于静止时,CAN-高速和CAN-低速信号电路未被激活,这代表逻辑“1”。在此状态下,两个信号电路电压均为2.5V。电压差约为0V。当传输逻辑“0”时,CAN-高速信号电路被拉高至大约3.5V,且CAN-低速电路被拉低至约1.5V,电压差约为2.0(+/-0.5)V。